2つ前のblog「「環世界」と「暗黙知の次元1」 」で暗黙知について紹介致しました。今回はこれの続きで例を追加致します。先回と同様にクルマの走行映像から複雑さパラメータを得(複雑さパラメータについては、「プロシージャル3 ・・・」 , 「物理シミュレーションの活用・・・」, 「プロセス絵画」で触れています。複雑さパラメータは現在の映像とほんの少し前の映像との差を数値化した値です。道幅が狭くクルマの周囲にモノが多い場合や、カーブなどの変化が大きい場合に大きくなります。逆に広い場所や同じ状況が続く場合には小さくなります)、これを元に映像を動かします。ぱっと見に映像が何故変化しているのかわかりませんが、しばらくクルマを運転していると、あるいは走行映像と比較していると、周囲の変化が大きい時に映像も大きく変化し、そうでないときは、おとなしくなることに気付きます。これは何だろう何を表しているんだろう、という志向性が大切でした。そして当初の何を表しているのだろうかという状態が遠位項、体験することで対応関係が分かり、情報から様子(意味)を感じ取れるようになることが、近位項であり身体化(内在化)でした。それでは次の動画を見ていただきましょう。
クルマが止まる時には表面を動いている映像が消え、道の両側に建物が多くある時に密集するようになることが分かると思います。
今回試みようとしたのは、具象と抽象とを混ぜた表現です。「暗黙知の次元」は紹介することが難しい分野です。展示等では、初めて見ていただく人に対して、5分程度で分かっていただく必要があります。暗黙知の次元は、内在化するには何度も何度も体験することで、言葉で表せないニュアンスを掴んでいくのが本質です。しかし実際にはパット見て分かっていただく必要があります。これは抽象では難しいことです。具象と抽象を混ぜることで分かりやすくできないかと思いました。思い浮かんだのが、ゲハルト・リヒターの「ビルケナウ」と言う絵です。本物を見たことがあります。迫力のある大きな絵です。パット見て分かるという類ではありませんが、見た瞬間に「オー、何だこれは」という強い衝撃があります。この絵は、下層にアウシュビッツ強制収容所の写真があり、その上に分厚く複雑に暗くペインティングされています。そしてそのペイントをナイフでそぎ落としています。見た感じは抽象画ですが、具象と抽象を合わせた絵です。下層に隠されたモノが在るという点では、ハイデガーの絵画論にでてくる、「隠されている」「開示」という概念の印象を受けます。この「隠されている」ということは、特別な状態の時に垣間見れ(例えば、大きな地震の時に道路に段差ができていて、舗装している層の薄さに驚く感じ)、何かあることを予感させます。また哲学の分野では「他者性」へと繋がっていく重要な概念です。「隠されている」ということが「分からなさ」に繋がり、「分からなさ」即ち「他者性」となります。今回は「隠されたモノ」についての議論ではありません。この具象の上に抽象を配置する、この部分を参考に致しました。
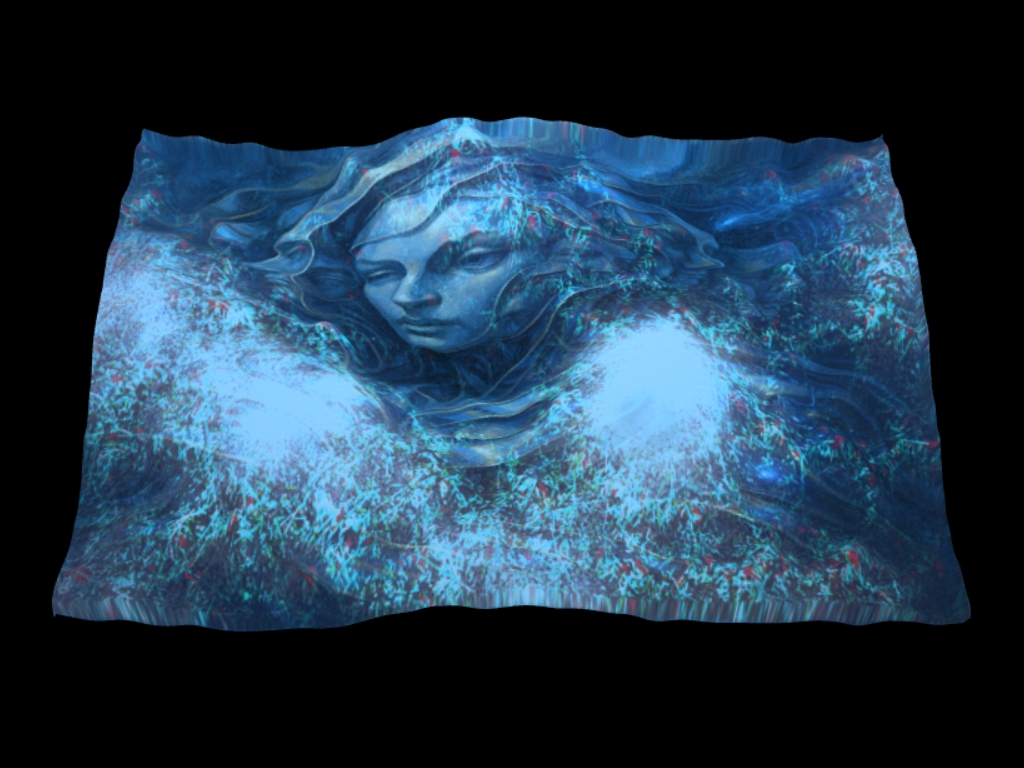
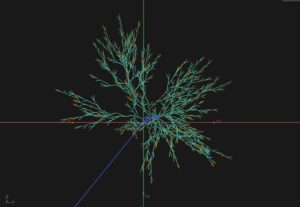
簡単に技術の紹介を致します。Touchdesignerで作製しています。絵の上に出てくる模様は3種類あります。立体化する大きなうねり(大きな白い動きも含む)、左から右、右から左と動く流れ、そしてチロチロとコケのような模様、です。立体化する大きなうねりはnoise TOPによる動きです。平面の女性の映像に動きを付けています、このように平面を立体化するのはpbr MATによるものです(ディスプレイスメントという技術になります)。これまでも述べてきましたが、pbrにcoler MAP(絵を表します)、normal MAP(軽い厚みを付けます)、height MAP(凸凹を付けます)を適応します。coloer MAPには女性の絵、それから上述の3つの模様を合成して与えています。他は上述の3つの模様を少し加工した映像を与えています。noise TOPにどういう映像を加えるのかというのが非常に重要で、次の2つの映像を足して入力しています。左から右、右から左へと動く流れは、GLSLによって作製したボロノイ図形が動く映像です。そしてチロチロ動くコケのような映像が、L-systemによる植物群です。この植物群の動きと明暗を、走行映像に合わせて動かすのが複雑さパラメータです。この植物群の作製とその動かし方がこの動画のキーポイントです。元の植物の図が以下です。
そして、この植物を特定の位置に割り付ける(インスタンシング)ことで、次ができます。
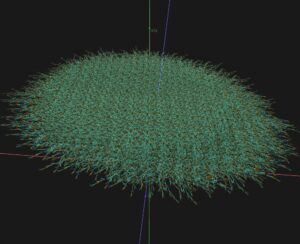
割り付ける元の植物の高さ方向の位置(z)と、サイズ及び回転の3つの値を決めるのが複雑さパラメータです。走行映像の複雑さパラメータが大きくなるほど、元の植物の位置を高くし(これはカメラに近くすることで大きく見せます)、植物自体のサイズを大きくして茂ったように見せ、回転させることで動きを与えています。これにより、複雑さパラメータが小さいときは、植物は小さく減った感じになり、ライトの当たる量が少なくなって全体的に暗くなります。反対に複雑さパラメータが大きくなる時は、沢山茂ったようになり、ライトによって全体的に明るくなります。これと流れをつくるボロノイ風の図形とミックスするわけですが、色が暗くなると全体が暗くなり植物やボロノイの映像が消えるようになります。明るいとはっきり形が見えるようになります。これにより、複雑さパラメータが大きい時に植物の動きが大きくなり、小さい時には現れないようにすることができます。走行映像から作製する複雑さパラメータは、中央と左右の3つに映像をわけ、それぞれで求めています。中央の複雑さパラメータが植物の高さ、右サイドが植物の回転角、左サイドがサイズに割り振っています。このようにして、走行映像に対応して模様が変化するようにしました。
「プロシージャル3 ・・・」では、創発的関係について述べています。今回の場合では、クルマの走行映像と植物から作る映像とは本来関係のない独立した存在ですが、それらに複雑さパラメータで関係を付けることで、何某かの感情が発生することでした。創発的関係は関係付けることで新たな感情が生じる側面を強調した言葉です。そして、暗黙知の次元は、内在化して言葉で語る以上の内容を知るようになる側面を強調しています。
女性の絵は、CopilotというAIが作製した画像です。よく見ていただくと、中央の顔の横に複数の顔があります。「シミュラークル」をテーマ絵を描くようにお願いしました。複数の顔は模倣を表しています。今回初めてAIによる画像とプログラムによる動きとを合成しました。相性はいいように思います。
もう一つ例を挙げておきます。
基本的に同じですが、左右に動きを与えていた図をなくし、代わりにグラドニ図形を使いました。グラドニ図形というのは、例えば太鼓の表面に砂をまいて叩くと、音に応じた図形が表面に現れます。このように振動と境界条件によってできる図形のことです。この模様の式は分かっており計算することができます。「https://www.youtube.com/watch?v=MpnKDIBTk7c」を利用しました。映像と非常に相性がよく、女性のアーマーと一体化しています。よく見ると少し厚みのある線でできた模様がうねっていることがわかります。植物の映像と複雑さパラメータとの関係は先の例と同じです。
今回具象と抽象とを混ぜた映像を作製しました。個人的には分かりやすくなった印象を持っております。音楽は走行映像からMAXを使って作製しました。
コメント