マッハ
音速の何倍かを表す速度の単位に名を残したマッハは、「感覚の分析」を著しています。この本で感覚が何処にあるのかを分析しています。初めて聞く方には何処にとはどういうこと、と思われるでしょう。結論を述べると感覚は「人とモノとの間」に在るとしています。この答えもまたどういうこと、と言う感じでしょう。この意味について考察していきます。このような考えを持った方として、他にはメルローポンティ、ギブソンがおられます。彼らを外観し、何故こうした考えが重要と思うのかという私見を述べたいと思います。
マッハは現象学を先取りした方です。例えばリンゴがテーブルにあるとします。光がリンゴにあたって反射した光が目には入り、人はリンゴを認識するというのが素朴な考えです。時間が経つことで、外界の光は変わり、リンゴの色は変わります。そしてリンゴは柔らくなるだろうし、匂いも変わっていくでしょう。部屋の温度の影響も受けているでしょう。このようにリンゴの状態はリンゴだけで決まっているのではなく、外界の影響を受けています。環境との相互作用を受けているのです。それに応じて私が感じるリンゴも刻々と変わります。私自身もさっきの私と同じとは言えません、別のことを考えてリンゴに対する興味を減らしているかもしれません。そうすると匂い等もあまり気にかけなくなっているかもしれません。このように考えると、人が感じたリンゴの感覚は、リンゴの中だけにあったとは言えないでしょう。またリンゴを見て触るまでリンゴの感覚はなかったのですから、私に元々あったことでもありません。それでは感覚は何処にあったと言えるのでしょうか、私とリンゴの間にあったのです。マッハは感覚は主観と客観の複合体であるとしました。私見を入れるなら、リンゴを触った時、あるいはリンゴをかじった時、その時の環境に影響を受けたリンゴの状態と私の状況によって感覚が産出されるとみなせるのではないでしょうか。これはオートポイエーシス的な考えです。こうした解釈が何の意味があるのかと思われたかもしれません。しかし私がモノを見ているという主観・客観の考えでは、刻々と変わる感覚が説明できないからです。こうした考えを入れることで、常に変わっている、新しい状況がいつも生まれているという解釈ができ、リンゴをかじったその瞬間が創発につながったりするのです。
メルローポンティ
現象学に身体性を持ち込んだメルローポンティは、「空間や世界は身体を通じて知覚される」と述べています。マッハの「感覚は人とモノとの間にある」と似ています。この説明にはしばしば野球やサッカーの試合をスタジアムで観戦している場合が使われます。自分を含めて応援している皆とスタジアム全体と一体となっている状態を挙げています。この場合空間と言っているのは、勿論一体となったスタジアム全体のことです。身体を通じてという部分が分かりにくいかもしれませんが、それはその一体となる状態を作るっているのが、声を出したり、腕を上げたりする行為で、それが私だけの行為でなく、全体が呼応し(同期している)、そしてその行為がまた、私を震わせているのです。そのことを身体を通じてと述べています。選手の動きを遠くから眺めている私という主観と客観の関係ではないのです。また身体を持ち込んだことで、新たな展開ができるようになりました。身体があるからこそ、練習して、鍛えて、こうなりたいという気持ちが生じるのです。つまり、早く走れるようになりたいとか、ピアノが弾けるようになりたい、とか、「なしうる」という方向に向かわせる志向性が生じます。それは自分の身体を使って行うことだからです。また例えば、手を伸ばしても届かない、そこに杖を使うと届く、うまく使えるようになれば自分の手のごとく扱える。これは感覚拡張です。この時杖は、そこにある杖ではなく手となっています。主体としての私と、客体としての杖の関係はくずれています。桜に手を伸ばせば届く、届かない、花を触る、触れない、といったことは自分の身体を元に決まります。あまりに離れていたら最初から触る気は起きません。つまり、触ろう、触りたいと思わせるのは、私の身体との距離が関係しています。このように少し考えてみると、身体は感覚・感情に強く結びついています。特に、物理的に重たく軽やかに動かないこの身体があるからこそ、練習しようとする気持ちが生じるのは勇気付けられます。
ギブソン(アフォーダンス)
次にギブソンの提唱したアフォーダンスについて概観しておきましょう。アフォーダンスの例としてよく登場するのは、ドアノブやテーブルです。ドアノブを見ただけでこのドアはドアノブを下げるのか回すのか、ドアを押すのか引くのか、といった情報が受け取れます。また受け取れるように設計しているのが一般に良い設計です。つるつるの平たい板が4本の脚に支えられていると、それこからモノを置く事ができる、食事ができる、ノートを置いて文字が書ける、等と言った情報を受け取ることができます。低い小さなテーブルだと、大人はそこで食事を取るという情報を受け取りませんが、子供なら受け取ることになるでしょう。梯子は高い所へ登れることを訴えてきますが、足を怪我している状況では、登れることをアフォードしません。このようにアフォーダンスは人や状況によります。生活習慣や歴史的・文化的背景に根差してもいます。それでは、アフォーダンスはモノに宿っているのでしょうか。そうではありません。ドアノブを下げる回すといいったことでも、手や腕の動き、大きさを考慮して作製されており、また先に述べた、生活習慣や歴史的・文化的背景に影響を受けているのです。ですから人に依拠しているところも多いのです。つまり、モノだけにあるのではなく、また人側にだけあるモノでもありません。人とモノとの間、関係性に宿るのです。これまでのblogの内容と関係して述べるなら、アフォーダンスはニューラルネットワークによる経験の蓄積と、ベイズ推定による状況の即時的判断が融合した結果として発現していると言えるでしょう。ここで重要だと思うのは、これにより人は未知の環境でもアフォーダンスを得ることによって、迅速かつ柔軟に行動することができるようになることです。「即座に次に何をすればよいのか、何ができるのか」を自然に理解する基盤を作っているのです。
もう一つ、オブジェクト指向プログラムとアフォーダンスとの関係を指摘したいと思います(オブジェクト指向プログラムについては、「オブジェクト指向プログラム、世界の捉え方」を参考にしてください)。アフォーダンスは特定の環境や状況でそのものに対してどういった行動や機能を提供するかに焦点を当てています。オブジェクト指向プログラムでは、プロパティ(性質:色、年齢、種類等)とメソッド(動詞に相当、走る、食べる等)を定義します。犬ならプロパティは犬の犬種、雄雌、色、等、メソッドは吠える、走る等です。これらはいくらでも増やせるわけですが、そのプロブラムの使う状況で限定した情報を与えます。この状況で犬から何の情報を取り出したいかをあらかじめ備えさせている、ということができると思います。これは場面設定と状況設定が行動を規定しているからです。このことからも状況即ち空間が影響を与えていることがわかります。独立したモノと私との関係ではありません。これはオブジェクト指向プログラムの限界も示しています。プログラムは通常想定している場面や状況に応じてかかれており、不意に起こる創発的な状況を想定することができません。
またアフォーダンスはインターラクションでは特に重要です。それは人が何をどうすれば装置が動き、機能が発揮できるのかを、説明なしで理解いただく必要があるからです。
認識論と存在論
今回、「人とモノとの間」認識論2-存在論、と表題をつけました。マッハ、メルローポンティ、ギブソンらは、存在論の側面もある人達です。どちらかと言えば認識論の側面が強いと思っているんだな、という程度に思ってください。認識論と存在論との境界は、恐らく「主客未分」を強く主張するかどうかにあります。今回の3名は「主客未分」に関心を寄せられており。存在論の側面も併せ持っています。切り分けは明確ではない理由は、彼らが探求している領域が、主観と客観、存在と知覚といった二元論的な枠組みを超越しようとしているからだと思います。この「間」の視点が彼らの共通のテーマで興味深いところです。一般的にはフッサールまでが認識論でハイデガーから存在論です。認識論が強かった時代から彼らが存在論を準備し、ハイデガーの「存在と時間」が一世風靡した感じを持っております。
プログラム例
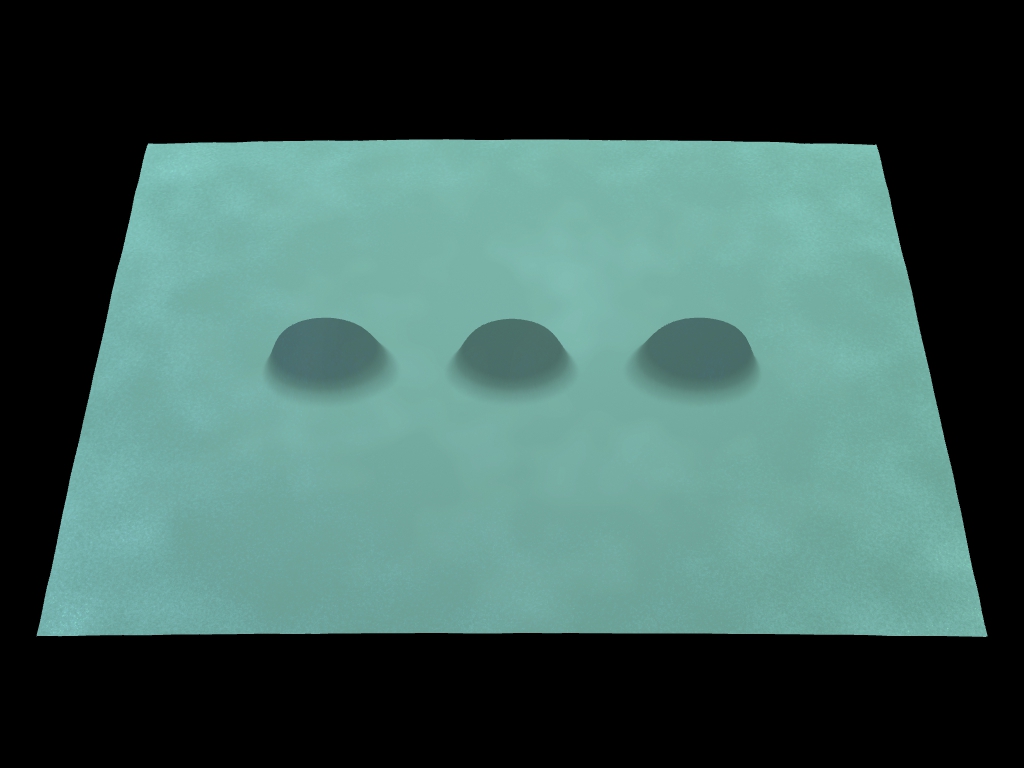
それでは作製した例を見ていただきましよう。最初の例はシグニファイアの例です。シグニファイアはアフォーダンスと似ています。アフォーダンスとの境界は曖昧なところがあると思います。サインと言う意味がより強い場合に使います。穴が空いていると押し込んでもい。凸になっているなら押してみてもよい、というように特定の意味をサインとして表す場合がシグニファイアです。
アフォーダンスやシグニファイアを感じとらせようとした場合、操作デバイスがモニターであると、平面画像で立体的に見せる必要があります(必ず必要があるとうことではありません)。この場合、光の当て方や陰、輪郭等に注意して、立体に錯覚するようにプログラムします。このことは空間を気にしていると言えるでしょう。それでは動画を見ていただきます。
最初穴が開いていて何だろうという感じを誘っています。手を近づけると音とともに持ち上がります。そして出っ張ったモノを見ると押したくなります(指を近づけたり、押そうと思われましたでしょうか)。このように動作を促そうとして作製しました(映像で人の志向性(指を入れたいとか押したいという気持ちのこと)を作ろうとしています)。技術的には何度も登場させているpbrで作る錯覚技法を使っています。色を使ったディスプレイスメントにより見た目が変化するようにしております。今回苦戦したのは凸と凹を基板となる平面を動かさずに作ることでした。結局pbrに使うMAPの色を変化させるのですが、pbrに使う2次元MAPを少し工夫しました。具体的には平面にツイスト(曲げる操作をするSOPです)をかけてやや上に凸の形状を作り、ライトをその部分に強くあてることで、3つの穴を少し立化化し、これをrender TOPで2次元にしています。こうすることで凸を作る部分に薄っすらと縁取りができるようになります。この縁取りによって立体的に見える立ち上がりを作っています。
次は模様のついた円板を回転させる例です。
黒いバーが右へいくほど円板の回転が速くなることが分かります(blogに動画をアップすることで回転が上手く表すことができなくなっています。恐らく速度の問題です。バーと回転の関係が一致していないこと申し訳ありません)。これでバーと円板の関係が伝わります。もし工学を学んだ人なら、バーが回転の速度を測定している、あるいは円板の淵の凹凸を測定しているように思われたでしょう。つまりバーが回転速度をコントロールしているのではなく、回転速度を測定している、と解釈された方もおられると思います。これは人によるアフォーダンスの違いを表しています。その背景には、こうしたセンサ―を作製したことがある、見たことがある、学んだことがある、といった背景の違いが関係しているでしょう。
もう一つ例を挙げます。
これは「プロシージャル2・・・」で示した怪鳥モグモグの移動を目で追う例です。通常目が対象の動きを追っていると解釈しますが、実際のプログラムでは怪鳥モグモグの方向に目を動かしているのです。そこで思いました。「実は実際も動く対象によって目が動かされているのかもしれない」。この場合は主体である私が、客観であるモノを見ているという図式ではありません。対象に動かされているのです。実際にこうしたことは多くあるように思います。見ようとしていなくても、モノが動くと目がそちらに行きます。音が鳴ることによって意識がそちらに向きます。そしてそれをきっかけとして、思考や思いが廻って行きます。これらの不意の出来事はとても大切です。こうしたことは、外から客観的に見ているのではなく、その空間の中に入っており、当事者として体験しているのです。
アフォーダンスは対象が何ができるのかを抽出することですが、まったく知らない対象に対しても役立つことがあります。その例を簡単に紹介致します。レンチキュラーレンズを使って何か作製できないかと考えたことがあります。レンチキュラーレンズは表示のおもちゃに利用されているプラスチックレンズです。触るとざらざらしており、傾けると絵柄が変わって見える表示に使われています。このレンズの特徴は角度で見え方が変わるという特徴の他に、点光源を線光源に変換する性質があります。これをどのように活用するかが問題でした。そこで検討したのが、普通の透明のプラスチック板がどのように使われているかということを調べ、それをレンチキュラーレンズに適応することでした。つまり似たモノがどう使われているかということです。例えばプラスチックの薄い板は、曲げて重ねる場合がある、間に薄いビニールを入れる場合がある、真空成型機で型を取る場合がある、と言ったことです。自分で透明プラスチック板を組み合わせていると、次第にアフォードできるようになります。これと同じことをレンチキュラーレンズで試していきました。すると次々と興味深い現象が見つかっていき複数の発明をすることができました。この例が、特開2022-98311 光演出装置及びレンチキュラーレンズ、特開2022-102709 光演出装置、特開2022-107385 光演出装置です。具体的には紹介しませんが、このように別なものからアフォードしたものを応用することで発明・発見につながることもあります。
私の主張は「ベイズ推定、思弁的…」で述べた主張と同じです。主観が客観を見ているという考えは合理的な考えを重ねていけます。しかし創発は生じにくく発明・発見に至りにくい考えです。創発を促すためには、「人とモノとの間」に注目し、千変万化する中に自分がいることを認識することが大切です。この偶然性からインスピレーションが得られるのです。これは思わぬことが生じる非線形性に注目する理由でもあります。

コメント