フィジカル・インテリジェンスの説明
フィジカル・インテリジェンスは、装置が周囲環境を理解して、実体をその環境に適応しながら動かす能力を指します。モノを実空間で動かすための知性です。現在のAIはコンピュータの中が主力ですが物理世界にも入ってきています。自動運転やロボットがその典型です。AIはもともと身体感覚がありません。このため、身体感覚を使ってコントロールしてきた分野に実装することはハードルが高い案件です。身体感覚には「暗黙知の次元」が入ってきます(2027.07.18 bloeg「「環世界」と「暗黙知の次元1」」)。「暗黙知の次元」というのは、マイケル・ポランニーが提唱した概念で、「人は言葉以上のことを知っている」ということです。言葉にできる、言葉で書ける知識は私たちが持っている全体の知識のほんの一部で、その背後には直観や体験といった言葉にできない深い知識の層が在ることを述べています。言葉にならないモノはプログラムできません。またAIで扱う大規模言語モデルの対象から漏れます。このためAIも多くの実例から学ぶ以外にすべを持っていません。フィジカル・インテリジェンスの物理世界に対するアプローチは、1.大量のデータとシミュレーションによる学習 2.センサーフュージョンと環境認識、3.生成AIによる軌跡(軌道)の生成、そしてこれらの融合です。これらは客観的に測定したデータをどう処理するかの外から見た扱いが中心です。オブジェクト指向存在論の考えでは、オブジェクト同士の関係を扱うので、このような外から見た神の視線を使いません。2025.10.17のblog「AIとオブジェクト指向存在論2」では、AIもオブジェクト指向存在論と同じく、「プロパティ+メソッド+退隠+翻訳」の構成を持つという私の見解を述べました。ここで、「退隠」とは、他者の「隠された側面(表に出ていない側面)」、「予測できない側面」のことを指します。そして「翻訳」とは、多層化している他者のどの層にアクセスして解釈するか、を指しています。
自動運転の例
自動運転を外観することによってフィジカル・インテリジェンスのイメージがつかめると思います。自動運転の初期の検討は、様々なセンサーで周囲に在るモノを測定し、それを避ける経路を測定結果から導くものでした。それが、ベイズ推定のようなデータを蓄えて統計手法を使い、「在る条件下ではこうなる確率が高い」といった、予測して移動経路を求める手法が登場しました。そして現在は、AIが導入され、より構造的で柔軟な記憶の使い方をしています。例えば生成AIを使って軌道生成する場合、過去の走行データや環境データをもとに「このような状況ではこう動くべき」というパターン全体を学習して、動的に軌道を生成するようにもなってきています。これは確率的推定を超えて、経験構造のモデル化と言えるでしょう。ではなぜ初期の空いているかどうかを客観的に知る単純な視点が破綻したのでしようか、完璧にパソコンと同じように瞬時に移動できるならセンサー信号を利用して神の視点で動かせば衝突しないでしょう。しかし物理的なモノは、遅延や慣性が入ってきます。このため対象の意図をあらかじめ解釈してどのように動くのかを予測して経路を決める必要があります。慣性や遅延を身体性と捉えるなら、自分の身体性と相手の身体性と意図を含めて動かす必要があるのです。オブジェクト指向存在論の視点では世界はオブジェクトの関係性でできています。自分の身体もオブジェクトなら相手の身体・意図は別のオブジェクトです。フィジカル・インテリジェンスはこのように、神の視点から身体の視点に寄せてきています。オブジェクトの関係性から、AIを用いてある経路を決定したということは、別の経路を「退隠」したことでもあります。そしてセンサーデータを複合して、センシングした物体は何で、どう動くかを予測しています。これがデータの「翻訳」にあたります。このことから、自動運転はすでにオブジェクト指向存在論的になってきていると言えでしょう。
モノを生物的に捉える考えと初期の検討1
身体感覚を通じて周囲を捉えるのは生物的な見方です。よりクルマを生物的に捉えようとするなら、身体性からみた「翻訳」ができるようにする必要があります。この技術も相当に困難です。身体性からの「翻訳」というのは、例えばある速度で向かってくるものがあるとすると、そのモノが大きいと、怖さが増す、威圧感がます、ダメージが増す、またこちらが頑強か脆弱かということも身体からみた「翻訳」には必要になります。これを実現するには、速度に絡み合った広い背景を持ち、それらを人の様に総合して感覚のように「翻訳」することが必要です。将来AIが身体感覚に翻訳する可能性はあります。身体性から見た「翻訳」についえ考えていると、2025.09.01のblog「ポテンシャルフィールド 環境とのインターラクション」の最短経路の探索が最初期の例として再解釈できるのではないかと思いました。再度これを使って検討してみます。
上の映像は山あり谷ありの凸凹した地形を通って、AからBへ行くルートを示しています。どの経路を取るかを決めるプログラム例です。経路はできるだけ平坦な道を選びます。凸凹はポテンシャル分布として与えます。障害物をそれに応じた高さのポテンシャルとしてみなします。AとBとをゴムで張り、持ち上げて話すイメージです。凸がつるつるなら、その形状に沿ってゴムは下に落ちていき、ルートが決まります。そのゴムの形状が最適と考えるのです。この方法は様々な経路の可能性を計算することなく、およそ最適な経路を見つけることができます。感覚的なふるまいを模倣した手法です。明示的なルールはなく、場の構造であるポテンシャル分布と、ゴムの関係性によって経路が決まります。このモデルで身体性を考慮した「翻訳」について検討します。センサーでポテンシャル分布の位置を決め、物体に応じて基本のポテンシャルの広がりと高さを決めることになります。そして過去の体験や周囲の状況、AIによる意図の解釈によって、ポテンシャルの高さと広がりが再設定することに対応します。そうすると、このポテンシャルはもはや障害物の大きさだけでなく、身体的な感覚の延長として解釈できます。身体が延長され身体にふれないように経路が決まるということです。これはセンサーデータがAIによってポテンシャルに「翻訳」されてたと解釈できます。このようなことが発展すると、センサーとAIを備えたクルマは身体性を備え、環境に応じて自らルートを決める知性と捉えれます。これはセンサーとAIを使って電子の道を決めるという現在の解釈から、身体性からのオブジェクト指向存在論的な解釈となります。
モノを生物的に捉える考えと初期の検討2
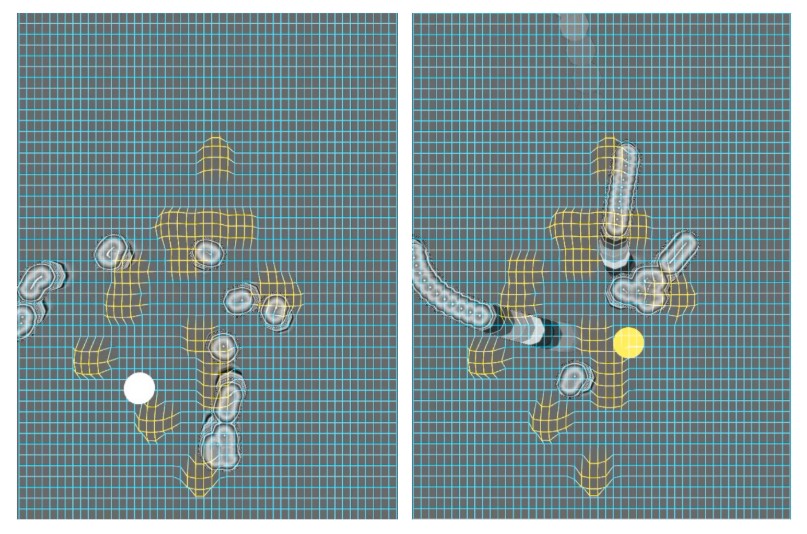
身体性から捉える解釈をこれまでのblogからもう一つ見つけました。2025.09.04 ポテンシャルフィールドを含めた「擾乱を伴う反復系」です。この映像を再度示します。
この動画では線状のポイントが変化するポテンシャルフィールドに衝突し形状を変化させながら、マウスの位置に向かって移動します。この映像を見ていて、ポテンシャルが無いところでは早く移動し、ポテンシャルが壁のようになったところでは、衝突して移動できなくなり、ポテンシャルとポテンシャルの間では集中し、曲がりながら移動する様子が見て取れます。これを逆に解釈します。装置が「ここは動きにくい」と解釈している状態が、ポテンシャルの間隔を狭く高くすることで表現します。「通過できない」と解釈している時は、ポテンシャルを帯状にして高くすることで表現します。「自由に動ける」と装置が解釈するときは、そこにはポテンシャル障壁をなくして表現します。このようにすると、装置が「環境との関係性」をポテンシャルの変形として記述していると言えます。ポイントの動きはその解釈を示しています。ポテンシャルの変化は装置の情動地図と言えるでしょう。この考えの延長では、例えば装置が「驚く」と言う場合は、突然急峻なポテンシャルが立ち上がる、あるいは、突然ポテンシャルの谷ができる、というように表現できます。また装置が「迷う」という場合は、動いたと思ったら、そこにポテンシャルが立ち上がり進めなくなる、方向を変えて進むと、今度はそこにポテンシャルが立ち上がり、どの方向ににも進めない、といった表現になるでしょう。このようにすると人工生命とポテンシャルの動きは、まるでモノが感情を表現しているかのように解釈できます。そして線状の人工生命のポイントの動きの平均や分布を使って実際の装置を動かすと、装置が「感覚を持っているような動き」になる可能性は大いにあるでしょう。この方法なら、パソコン内でつくる情動を表現すモデルは複雑でも、装置に対する出力はシンプルにできそうです。これは実装する観点からは大変メリットがあります。
上の二つの映像はこれまで作製した例でしたので、一つ新しい例を試してみました。線状のポイントが追っかけるマウスの色が急に変化した時、人工生命が驚く表現です。マウスの色変化が何か起こったことに相当します。あわてて飛び散る感じにしてみました。
どうやら表現は増やせていけそうです。今後は表現を増やし、それらを統合したプロブラムを作製、その後小型のマイコンを使って、何らかの実体を動かしてみたいと思っています。更に過去の体験を活かすためにAIを入れれるなら素晴らしいでしょう。結構長丁場になりそうです。モノを身体から観る視点は、オブジェクト指向存在論のオブジェクト同士は同列であることに繋がり、客観的に外からコントロールするという神の視点を排除する見方です。自律したオブジェクト同士が相互作用することを目指すには、必須と考えています。
表紙の画像は上の動画からキャプチャーしたものです。ポテンシャル障壁が障害となっている場面と驚いた場面を示しています。
本件でblogは50報目です。半年続けてこれました。自分の考えていることの整理にはなっています。読んでくださっている方が楽しめていることを願っております。

コメント