今回は2025.07.21のblog「プロセス絵画1」の続編です。少し進展したので報告致します。「プロセス絵画」では、音楽やインターラクション、クルマの運転等は、目的を果たした時に、その過程(プロセス)がモノとしては何も残らない。音楽だけは、録音と再生デバイスおよびプロモーションが発達したおかけで、普及していると述べました。そして、インターラクションの体験や目的地へ行くまでの運転過程を何とか保持する方法として、プロセス絵画を提案しました。
プロセスが重要になる用途をもう一つ思いつきました。それはAIに関する案件です。AIによって人が作製したモノと、AIが生成・作製したモノと区別がつかなくなった時、何に価値が移るのかを検討しました。「人間は人間に興味があります」。ですので、それを作製するプロセスに意味を見出すのではないかと思いました。作製したモノの背後にあるナラティブです。これをきっかけに再度プロセス絵画を見直しました。
先回の「プロセス絵画」では、クルマの走行映像から複雑さパラメータを抽出し、それをx, yにあてはめ、zを映像全体を1とした現在の位置として、軌跡を描きました。そして全体の軌跡を描いた後、エフェクトをかけて抽象的な絵にしました。今回一番違うのは、軌跡そのものを絵になるようにした点です。技術的には新しいエフェクトを作製しただけです。その後AIを使ってその絵が何に見えるか尋ねています。もう一つ重要な点として、x, yの複雑さパラメータは同じですが、zを画像全体の複雑さパラメータに変更したことがあります。以前の方法では走行映像全体が分かっている必要があったのですが、今回は、x,y,zとも複雑さパラメータですから、走行しながら軌跡にエフェクトを掛けていき、途中の映像にも意味を見出すことができます。それでは作製した映像を見ていただきましょう。最初は長久手市街を走行した場合の映像です。走行している期間は長いので途中だけです。
次に、中央自動車道を走行した場合です。
映像の左上に走行場面を加えています。横方向に伸びるのは走行映像の中央に変化が在る場合です。特に顕著なのはカーブする時です。また道路に歩道橋のような橋や大きな看板がある場合にも反応します。縦方向に伸びるのは走行映像の左右の変化が大きい時です。ですので、狭い道に入った時や、建物が両サイドに沢山ある時等です。等高線のような表示ができたことで、走行過程の映像の見栄えが上がったと思っています。このように走行過程を抽象的な表現で表すことを、「動的抽象化」と呼ぶことにしました。2025.10.26のblog「フィジカル・インテリジェンス」で描いたポテンシャルも、もしセンサーデータを基にして描いたならば動的抽象化になります。音楽はMAXで作製した自動作曲です。これも複雑さパラメータを基にしていますので、音の強弱は場面と同期しています。こういう場面で、こんな風に変化するなら、この道はどうだろう、という気持ちが誘発できると思っています。次の映像は、長久手を走行した場合の全体の軌跡です。20倍速で軌跡を作製しました。
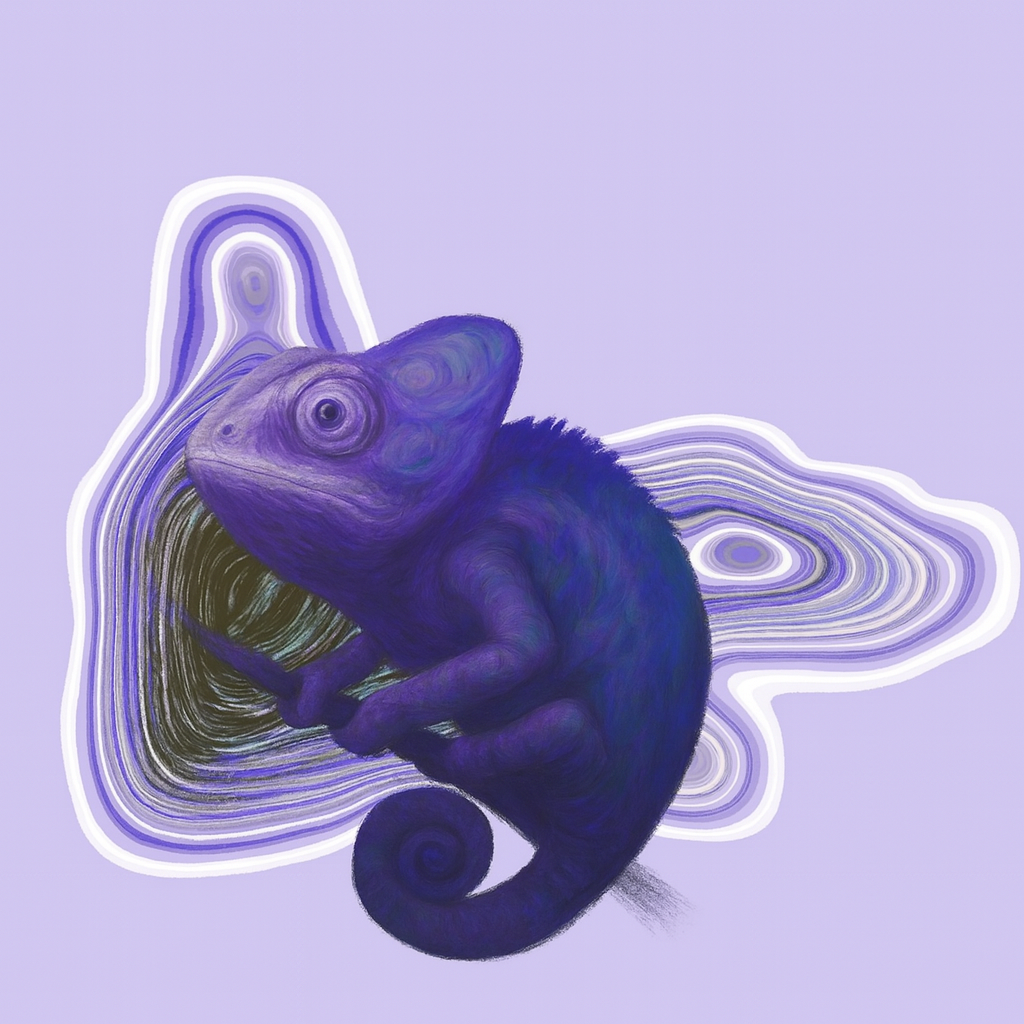
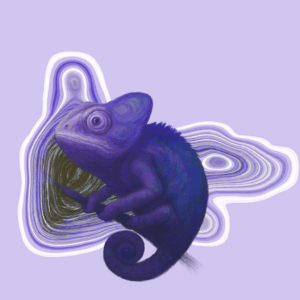
次にこうして作製した最終的な画像をAIに見せて、どんな生物あるいは動物に見えるかを描いてもらいました。AIはCopilotです。長久手を走行した最終画像からは生成した絵が次です。
中央自動車道の場合は次のようになりました。
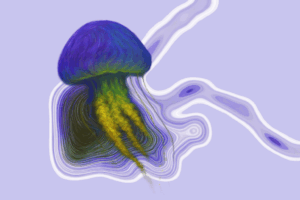
なかなか、それらしい画像を生成しているのではないでしょうか?
長久手はカメレオンで、中央自動車道はクラゲです。
カメレオンは顔の形と、等高線が尻尾に表現されているように見えます。またクラゲは触手がちょうど、自動車道の料金所を通るところでできた広がりに対応しているのでしょう。長久手の市街地はカメレオンで、中央自動車道がクラゲなら、別のところは何になるだとう、夜に走行するとどうなるだろう等、気持ちを誘発します。
この2つの画像のように、走行軌跡とAIが作製した生物とを重ねると、また、それにちょっとした言葉を添えておくと、あの時あそこへいったなあー、と思い出すきっかけにもなるでしょう。
抽象的な画像に対して、AIに何に見えるか尋ねるのは面白いと思いました。プロセスデータの可視化と固定化、AIとの組み合わせは、プロセスに意味を与える可能性を感じました。


コメント