はじめに
暫く単体のストレンジアトラクター自身やそのコントロールについて考えてきました。次に単体のストレンジアトラクター(ユニット)の状態を検出して、別のストレンジアトラクターにそれを伝達する、といった情報の伝達を考えてみてはどうかと思いました。今回はその準備です。ストレンジアトラクターを使わずに、より単純なモデルを使って情報伝達を行います。特徴は画像の変化を検出して、次にそれを伝達することです。ニューロンの発火をイメージしましたが、ずっと単純な内容です。これを通じでユニットにどんな機能が必要か検討しました。
情報伝達モデル
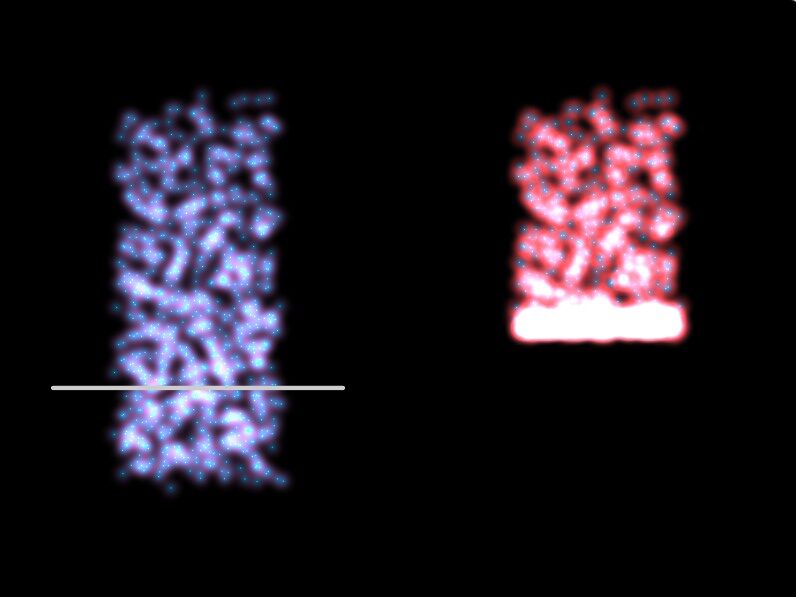
粒子を流しておき、それが在る領域に達すると、もう一つから粒子が流れ出す。という単純なモデルです。中継しながら伝達していくシステムです。川上の粒子の流れが途絶えると、川下の粒子の流れも途絶えます。また、川下の粒子の流れが途絶えた場合は、川上の粒子も途絶える機能を付けています。粒子が在る領域に来たということを、画像で判断するのが、今後に繋がる方法と思っています。それでは作製した映像を見てください。
上側の青い粒子が縦線の右側に入って行くのを検出して下側の赤い粒子が動きます。また流れを遮断する機能を入れて、縦線の右側に粒子がなくなると、赤い粒子も放出を止めます。最後に赤い粒子が先に放出を止める場合、遅れて青い粒子の放出がやみます。プログラムの主要部分を次に示します。

particle SOPを使うために基本的な構成です。この図は青い粒子を作製する部分です(ユニット)。これと同じ構成で、赤い粒子を作製する部分がもう一つあります。その2つは、制御信号で結ばれています。particle SOPは2つの仕方でコントロールしています。一つは、paticle SOP内のForcesタブを使います。粒子が平行に移動する場合は、Windパラメータのx方向に0.5, Turbulenceパラメータのx, y, zを全て0.5にしています。粒子を止める場合は、これらを0にします。0の場合、風がないので粒子は流れません。もう一つはparticle SOPの第2インレット(Input1 Collition)を使う方法です。sphere SOPをdelete SOPを介してparticle SOPの第2インレットに繋げています。delete SOPはsphere SOPを第2インレットに繋ぐ・繋がないをコントロールします。通常、パラメータDelete Geometory, Keep Pointsをonにしてdeleteする、即ちsphereを無効にしています。これをoffにするとdeleteが機能せず、sphereがparticle SOPに繋がります。この時、paticle SOPの第2インレット(input1 Collition)に繋がっているので、sphereが障害物(衝突の対象)として機能します。particle SOPはこのように、Forces(WindはForcesの一部です)と第2インレットのCollitionによってコントロールできます。今回使っておりませんが、第3インレット(input2 Force)を使うと外部からもForceを与えられます。
縦線の右側に粒子が来たことを検出する部分が、render TOPから繋がっているcrop TOP からexpress CHOPまでの接続です。crop TOPは画像の一部を切り取る機能で、縦線の右側を切り取っています。続くanalayze TOPで平均としての色を検出しています。これをtop to CHOPで数値化してexpress CHOPで閾値判定しています。画像のある部分に入る量を求める際によく使う方法です。閾値判定して値が1になると、次の赤い粒子が流れ始めます。このように画像を使った方法によって、次に伝達していくことができます。
パーティクルの色はramp TOPとpoint sprite MATを使って付けています。粒子の色とサイズを変える場合に、この組合わせを使います。
まとめ
映像による情報伝達モデルの基礎として、一つのユニットの中で粒子が在る領域に到達すると、別のユニットから粒子を放出するモデルを作製しました。一つのユニットに、流れを作る機能、状態を検出する機能、途中介入する機能、次のシステムを動かす信号発生機能、を備えると、順次ユニットを動作させていくことで、伝搬させることができ、且つ途中介入することができます。

コメント