はじめに
TouchDesignerは、システムAは2階の線形微分方程式の相空間、システムBはトーマスのストレンジアトラクターの相空間であったとして、それをそれぞれを何らかの方法で結んで、関係するシステムCを作る、といった並列のシステムを結合させることが苦手です。勿論システムAは移動を現わし、システムBはエフェクトを現わし、システムCは立体化する、といったような場合は、システムA+システムB+システムCを作ることは容易です。つまり従属接続のネットワークは普通にできますが、並列のネットワークの相互作用が難しいのです。プロシージャルは一つのシステムの中で完結させるのが基本です。一方回路シミュレータのノードを結線していくタイプは、独立した並列のシステムを、容量で結行させることが普通にできます。これは回路シミュレータでは各ノードに対してキルヒホッフの法則を解くからです。電磁場でいうならdivD = 0(入ったモノは出る)、divD = ρ(あれば湧き出す)に相当します。これらと、位置の動きを追うモノとは本質的に違います。ポイントがどう動いたかを追うシステムにはキルヒホッフの法則のような、入ったものは出る、といった法則がありません。その代わり回路シミュレータが解けるのは電流と電圧の関係ですから、位置を平面や立体で表すようなことはできません。これは仕組みが違うので両者を望むのは無いモノねだりです。ただ仮に微分方程式に落とせると、それは電子回路で記述できる場合があるので、位置のシステムを電圧電流のシステムに変換できます。そして、電子回路で相互作用を解く、という方法がとれないわけではありません。それこそ大昔、オペアンプを使って微分方程式を解くのアナログコンピュータシステムがありました。今でもカオスを解くと言った場合には、電子回路で解く方法は有効だと思います。電子回路を長年行っておりましたが、そうした方とお会いしたことは1度しか無く、今ではかなり稀有だと思います。しかしそのようなことをしなくても、SDF(Signed Distance Field)を使うと、システムA、Bは別々のままだけど、関係性がある場を作ることができます。これが今回発見したことです(この現象に大変驚いていますが、おそらく知られていることでしょう)。この現象を利用して2つのシステムを合成した場を作ってみました。2つ以上でも作れます。作った場は正面から見ているので、これをpbr MATを使って立体化しました。非常にダイナミックな映像ができました。
SDFによる場の関係性
4月からSDF(Signed Distance Field)を扱っています。これは粒子(ポイント)に対して、sphareやtorusを当てはめて、そのモノの表面からの距離に着目した場を作ります。2Dの場です。これをベクションで表示して3Dのように見せてきました(2026.04.05のblog「モノの形状が作る場:SDFの概念と可視化・・・」, 2026.04.16「場を利用したベクションの表現」)。システムAは2階の線形微分方程式を解いたポイントの位置、システムBはトーマスの微分方程式を解いたポイントの位置、というように2つのシステムがあった場合、これらを直接相互させることは簡単ではありません。しかしシステムAで作ったポイントとシステムBから作ったポイントをマージして、それからSDFを作ると、システムAとBとは相互作用しませんが、形状が合成されたSDFになります。つまりSDFを作るもとの図形は合成されるので、SDFは合成された結果の場を表示します。つまりシステムAのポイントとシステムBのポイントが近ければ、形状は繋がるので、相互に関係する場になります。これはそれぞれをSDFで描いた場を重ねた場と違っています。何故このようなことができるのかはSDFを思い起こすと理解できます。SDFはポイントである位置を幾何学的な場に変換するからです。二つのシステムからできるポイントにそれぞれ形状を当てはめますが、この時に図形が合成されるからです。これはそれぞれのシステムでSDFを作り、足した場とは異なります。つまり関係性があるのです。「はじめに」で書いた内容では、相互作用させるには一旦微分方程式にして電子回路の記述にする場合を述べましたが、微分方程式の電子回路化でなく、幾何学を使うことに相当しています。TouchDesigerでのPOPでは、SDFが容易に扱えますので、これはTouchDesignerを使う場合に優れた手法だと言えるでしょう。粒子の作り方に幾つか組み合わせを試した中で、映像としては相転移に見える組み合わせを見つけました。これについても紹介致します。
SDFでの合成の例
2階の線形微分方程式とトーマスのアトラクターとの合成の例
まず過去のblog内容を採録を使って説明します。2階の線形微分方程式の発散と収束の繰り返しの図が次です。「微分方程式のコントロール及び「相空間と固有値」の関係」で述べた映像です。
この映像では、初期値は2点与えており、それがどう動くかを示しています。軌跡は動きをフィードバックを使って見える化したものです。この先端が常に今のポイントです。この2つのポイントをtorusを割り付け、SDFを描いた映像が次です。「「相空間×SDF」1:2階の線形微分方程式が作る場」で記載した図です。
一方、トーマスのストレンジアトラクターを1ポイントの軌跡として描いた映像が次です。b=0.15の場合で2領域の結合が在る場合です。「「相空間×SDF」2:ストレンジアトラクターが作る場」からの抜粋です。
これのSDFが、
でした。トーマスのストレンジアトラクターは3Dですので、形状が平面に影響を与える機会が少なくなっています。
今回行うことは、これら2つのシステムを合わせたSDFの場を描く内容です。プログラムの主要部を次に示します。

2階の線形微分方程式を解く部分とトーマスの微分方程式を解く部分があります。point POPは、pointの初期値を示しています。2階の線形微分方程式は1ポイント、トーマスの微分方程式は3ポイントを設定しております。トーマスのストレンジアトラクターは3次元ですので、平面のSDF空間に位置するタイミングが少ないです。そこで、x,yはストレンジアトラクターの位置ですが、z=0として固定しました。つまり、3ポイントが常にSDFを作ります。2階の線形微分方程式からの位置は収束と発散を繰り返す周期運動をしています。2つの微分方程式から得た位置をmerge POPで合成し、これをSDFを作製するブランチのfield POPに入れています。図形はtorusです。これで4ポイントのSDFが作れます。それでは作製した映像を見てください。
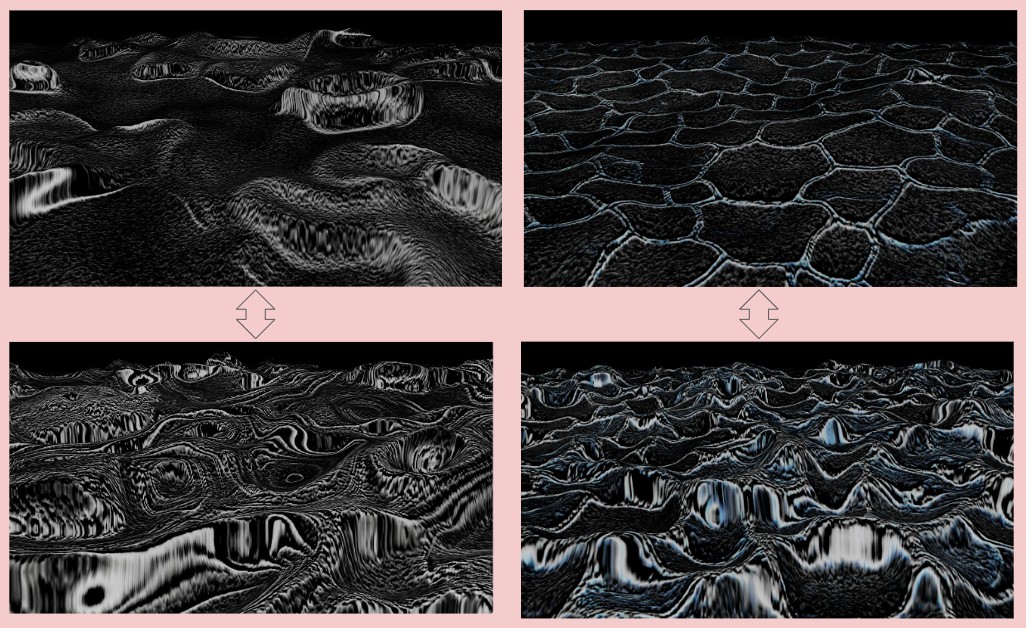
中心から円を動くように発散し収束するのが2階の微分方程式によるもので、不規則的に見える三つがトーマスの微分方程式によるものです。SDFはそれぞれの図形と重なりまた離れ、相互に影響した場を作っています。各ポイント間では相互作用が無いにもかかわらず、SDFでは関係性を持った場になっているところが重要なところです。つまり粒子を動かす層と「現われ」の層とがあり、関係性は「現われ」の層で示します。
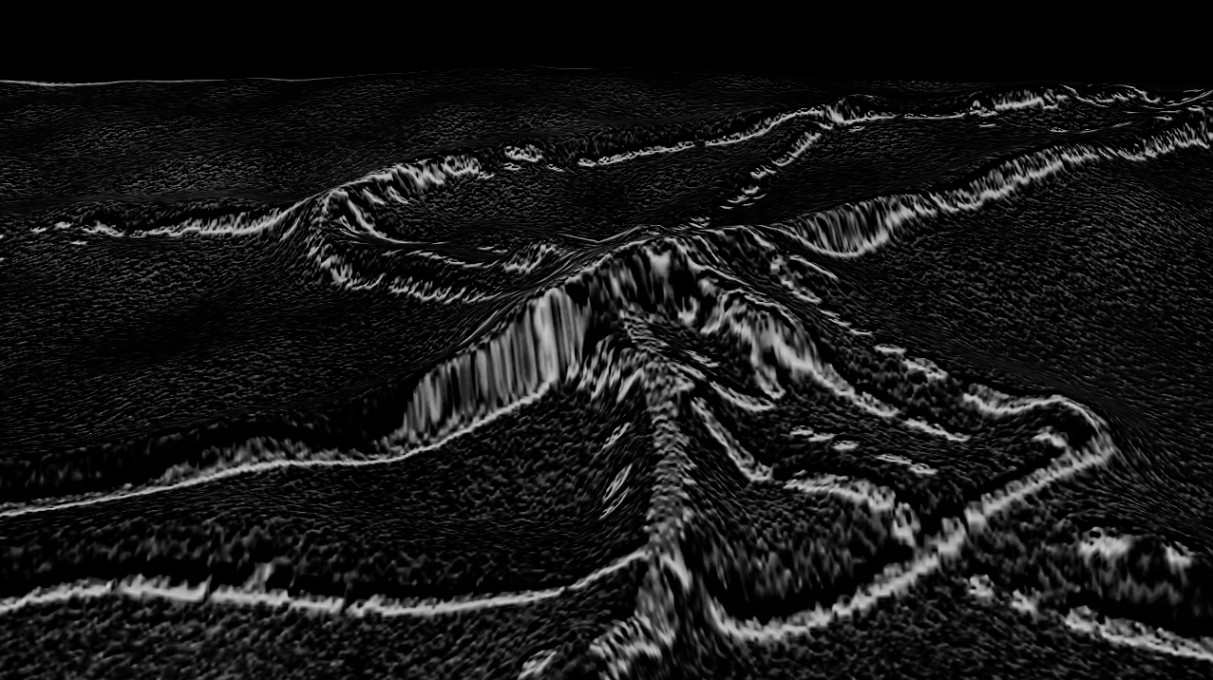
SDFの場は平面です。ベクションを使って立体的に見せています。2026.02.13のblog「視線の違いによる映像の影響」で指摘しましたが、真上から見る映像に対して人は立体感を持ちにくい性質があります。そこでpbr MATを使って立体化することを考えました。SDFの映像を使って、color MAP, normal MAP, hight MAPを作り、pbr MATにアサインすることで、立体化しました。このプログラムは先回の「相転移と志向性」同様、「痕跡4」で示したモノです。
ダイナミックな地形に変換することができました。
2階の線形微分方程式と衝突回避する3体のポイントとの合成例
2階の線形微分方程式とトーマスのストレンジアトラクターとの組み合わせで両者が関係する場を作ることができました。しかしストレンジアトラクターの相転移に相当する部分が分からなくなっています。細かな部分が反映できないようです。そこでSDFやpbrで変換した時に状態の変化がより分かりやすい例を作製しようと思いました。そうすれば先回の「相転移と志向性」同様、志向性の変化を創り出すことができるでしょう。思いついたのが、2025.12.09のblog「3体間の衝突回避と発振」で示した、3体間の衝突回避の映像です。これはパラメータによって、3体のオブジェクトが動きまわる状態と発振して円運動を行う状態をコントロールするモノです。トーマスのストレンジアトラクターの代わりに、これを使うと外から観た場合、相転移したような映像になるのではないかと思いました。3体間の衝突回避の映像を採録しておきます。
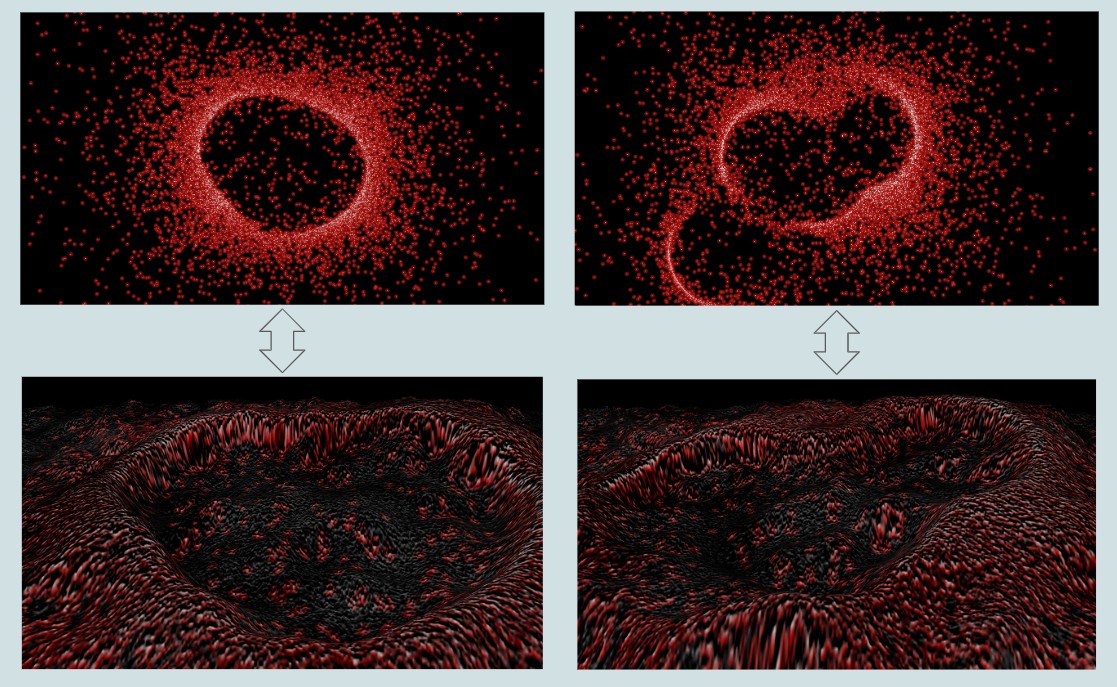
3体の各オブジェクトの中心点をポイントにしてSDFを作製したのが次の映像です。各ポイントのx,yを利用しz=0として平面の動きとしました。
最初3体は発振状態にあります。この時3体の回転運動の速さにSDFは対応しておらず、一つのかたまりになっています。一つの固まりから外へ広がりまた戻るのは、2階の線形微分方程式の発散と収束の動きです。しばらくすると、ばらばらと3つのポイントがそれぞれ動きだします。これは、発振状態を解除したからです。その後、また発振状態にしました。これで最初の状態に戻ります。この映像をみていると、まるで相転移したかのように振舞っています。次にこれをpbr MATを使って立体化してみました。
最初円状の凹みがあり、その周りを円形に動きが生じ、次に自由な動きに変わります。そして円状に戻ります。相当にダイナミックな変化が実現できています。円形の窪みの状態では、まだ触ろうと思いますが、ボコボコとう動きはじめると、触ってはいけないような気になりました。これが志向性の変化です。3体間の衝突回避の動きを使うと、身体の動きに対応した相転移的な映像を作ることができ、志向性の変化を作るのに活用できそうです。
まとめ
2つの並列なシステムを相互に関係づけることがTouchDesignerのような位置を追うシステムでは困難です。しかし位置を合成してSDFにすることで、相互に関連する場を作ることができ、この問題の解決策になることを示しました。そして状態変化のハッキリした3体間の衝突回避のモデルを使うことで、相転移したと思わせる場を作ることができました。pbr MATを使った立体化した映像はダイナミックで、志向性を変えることができそうです。
コメント